AQUAS
Columbia Robotics Club
Project Overview
The AQUAS club is dedicated to building autonomous aquatic vehicles that can perform various tasks, such as environmental monitoring and water treatment.
Technical Details
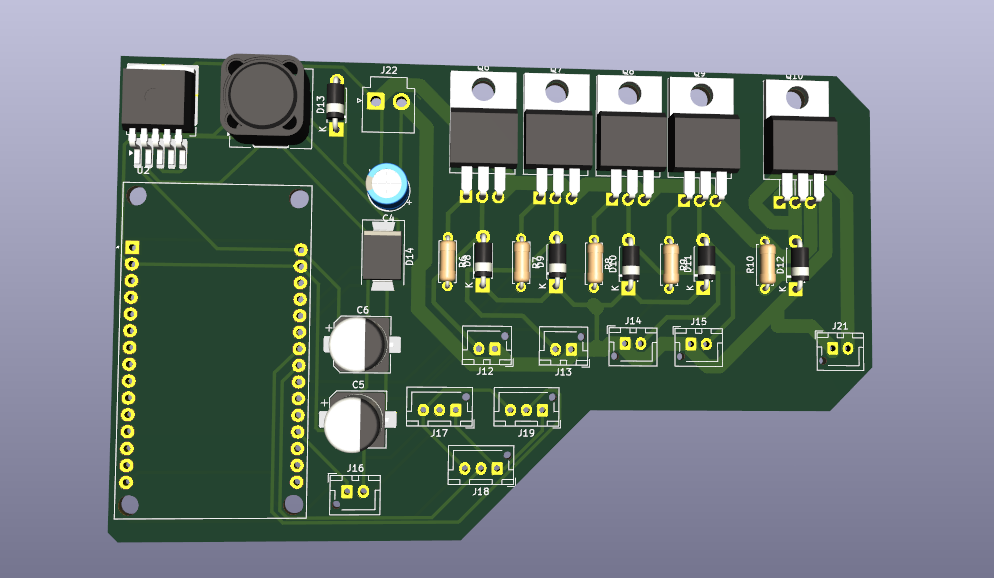
Part of my role in this club was designing the circuitry for the dispersal and sampling system. This proved quite the challenge, as the systems were under some heavy constraints. Firstly, the battery. Both systems are subject to long periods of deployment, and are limited to small batteries that can be carried by our vehicle. To design a board that can operate multiple motors and servos under low power is therefor a challenge. I learned to minimize power draw in a board through various methods, such as stepping down voltages using buck converters, and using low power components. Secondly, the environment. Both systems are subject to water damage, and must be designed to be waterproof. This meant that I had to design a board that could be easily sealed in a waterproof enclosure, and that could withstand the pressure of being submerged in water. Collaborating with the Mechanical design team, we came up with a product that accomplished both of those tasks. Finally, the teaching. I am not just a designer, but also a teacher. I had to teach the other members of the club how to use the board, and how to troubleshoot any issues that may arise. This was a challenge, as I had to explain complex concepts in a way that was easy to understand for people with varying levels of experience with electronics.