Hackathon
A project built in 24 hours at the 2025 Columbia Engineering Hackathon
Project Overview
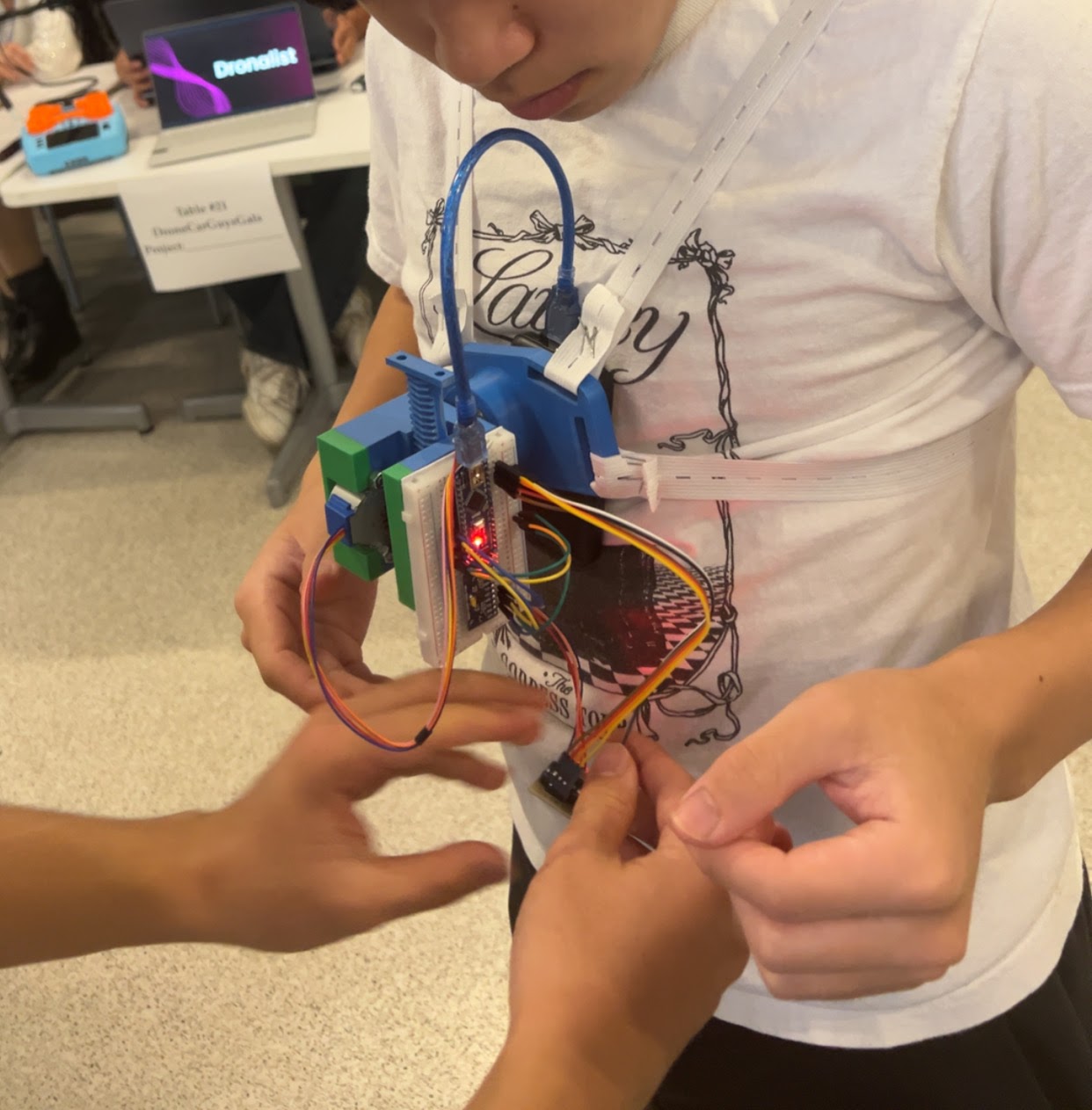
For the 2025 Columbia Engineering Hackathon, I worked with a team of 4 other students to create a self stabilizing gimble for camera and film applications.
Technical Details
Because I was the only one on the team with experience in hardware, I took on the role of designing and building the circuitry for the project. This involved using a combination of off the shelf components, such as an IMU and a motor driver, and an arduino nano. The first challenge I faced was integrating the IMU with the arduino. I had to research how to read data from the IMU, and how to use that data to control the motors. I also had to design a circuit that would allow me to power the motors and the arduino, while also keeping everything compact and lightweight. In the end, we were able to create a working prototype of this gimble, and we were able to demonstrate it at the hackathon. It was a great experience, and I learned a lot about working with hardware in a team setting.